Можно ли как-то открыть RCS (облако точек) в 3д макс?
есть dwg Но там файл как внешняя ссылка (облака) и открывается просто плэйны в макс, подскажите пожалуйста как работать с облаком в 3д макс? возможно ли это?
На сайте c 02.07.2014
Сообщений: 3005
Ярославль, Москва
Чаще всего облако точек объекта состоит из нескольких частей. Каждая часть имеет формат RCS. Головной файл, который загружает сразу всё облако имеет формат RCP. Ваш файл можно загрузить в Макс через «standard primitives — point cloud objects».
Чтобы сделать привязки надо в «grid and snap settings — snaps» вместо «standard» выбрать «point cloud objects».
Читают эту тему:
Последнее на форуме
- Закрывается 3ds max рандомно без ошибок
- Друзья! Поделитесь интерьером готовым) не бесплатно конечно
- [Администрация] Вывод авторских для пользователей РФ
- Актуальные конфигурации компьютеров
- Помогите найти модель!
- Позитивное
- Vray GPU
- Рендер-ферма K3D (7 пк, 116 ядер, 96гб ram)
- Пересохранить в более старую версию
- Corona 11
Заказы
- Создать материал Corona
- Работа с Иконами,большой объём. Фотошоп
- Ландшафтное проектирование
- Симуляция молочной реки и водопада в 3ds Max
- Рабочие чертежи дизайн-проекта
Вакансии
- Предметное моделирование
- Оптимизатор 3Д моделей для UE5
- Визуализатор
- Проектировщик
- Чертежник / помощник дизайнера / автокад
Резюме
- Интерьерные чертежи Revit
- UE. Corona. Animation. Visualization. Education.
- 3D-Визуализатор
- Создание графики для рекламных роликов | Разработка интерактивных приложений и игр. Основной софт: Unreal Engine 5, 3ds max, After Effects
- 3D визуализация интерьера
Добавление файла *.las в файл проекта Revit
Лидар (транслитерация LIDAR англ. Light Identification Detection and Ranging – обнаружение, идентификация и определение дальности с помощью света) – технология получения и обработки информации об удаленных объектах с помощью активных оптических систем, использующих явления поглощения, и рассеяния света в оптически прозрачных средах. Лидар как прибор представляет собой, как минимум, активный дальномер оптического диапазона. Сканирующие лидары в системах машинного зрения формируют двумерную или трехмерную картину окружающего пространства. «Атмосферные» лидары способны не только определять расстояния до непрозрачных отражающих целей, но и анализировать свойства прозрачной среды, рассеивающей и поглощающей свет. Разновидностью атмосферных лидаров являются доплеровские лидары, определяющие направление и скорость перемещения воздушных потоков в различных слоях атмосферы. Устоявшийся перевод LIDAR как «лазерный радар» не вполне корректен, так как в системах ближнего радиуса действия (например, предназначенных для работы в помещениях), главные свойства лазера: когерентность, высокие плотность и мгновенная мощность излучения – не востребованы; излучателями света в таких системах могут служить обычные светодиоды. Однако в основных сферах применения технологии (метеорология, геодезия и картография) с радиусами действия от сотен метров до сотен километров можно использовать только лазеры. Рассмотрим задачу вставки LIDARовского файла *.las в файл проекта Revit. Это можно осуществить через вкладку Вставка ⇢ панель Связь ⇢ инструмент Облако точек.  Autodesk Revit не читает файлы *.las, но обладает встроенным функционалом для преобразования облачноточечных файлов в формат *.rcs. [i] Чтобы открыть файл *.las, в окне Связь облака точек, в строке Тип файла выбираем Все файлы, тогда отобразится файл *.las.
Autodesk Revit не читает файлы *.las, но обладает встроенным функционалом для преобразования облачноточечных файлов в формат *.rcs. [i] Чтобы открыть файл *.las, в окне Связь облака точек, в строке Тип файла выбираем Все файлы, тогда отобразится файл *.las.  После нажатия кнопки [ Открыть ] появляется окно, где предлагается преобразовать файл в формат *.rcs.
После нажатия кнопки [ Открыть ] появляется окно, где предлагается преобразовать файл в формат *.rcs.  Нажимаем [ Да ], после этого появляется окно, в котором запускаем индексацию
Нажимаем [ Да ], после этого появляется окно, в котором запускаем индексацию 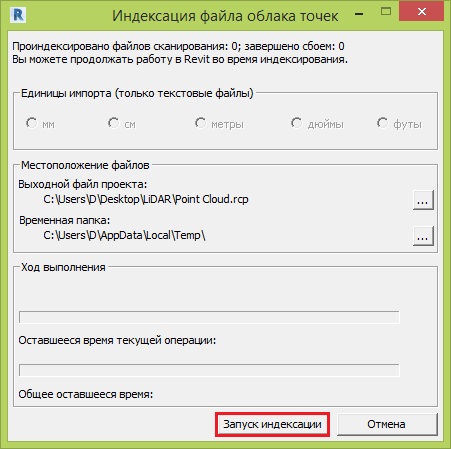 После индексации появится два файла: *.rcs и *.rcp. Через вкладку Вставка ⇢ панель Связь ⇢ инструмент Облако точек открываем файл *.rcs.
После индексации появится два файла: *.rcs и *.rcp. Через вкладку Вставка ⇢ панель Связь ⇢ инструмент Облако точек открываем файл *.rcs. 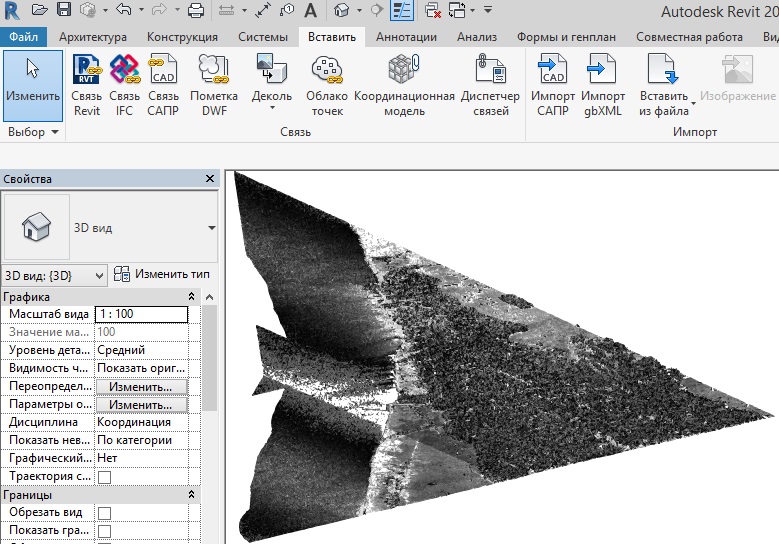 Softprom – официальный дистрибьютор компании Autodesk. Отправить запрос
Softprom – официальный дистрибьютор компании Autodesk. Отправить запрос
Поделиться:
Softprom © 1999-2024
Все права защищены.
- Направления
- Видеобезопасность
- ИТ Безопасность
- ИТ Инфраструктура
- Облачные Сервисы
- САПР, графика и мультимедиа
- Стать партнером
- Регистрация
- Производители
- События
- Вакансии
- Политика конфиденциальности
- О Softprom
- Карта вендоров
- Контакты
Наш сайт использует cookies-файлы. Продолжая сеанс, вы даете согласие на сбор и обработку данных. Подробная информация о Политике конфиденциальности.
Privacy policyИмпорт облаков точек

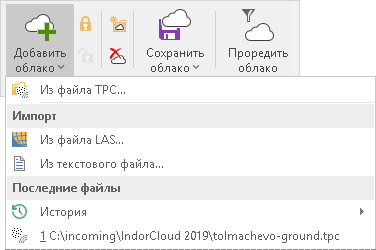
Работа в системе IndorCloud начинается с загрузки облаков точек. Возможен импорт облаков точек из текстовых файлов TXT и файлов формата LAS. Команды для импорта облаков точек располагаются в выпадающем меню кнопки Главная > Облака точек > Добавить облако .
Замечание. Формат TPC — это внутренний формат системы IndorCloud для хранения облаков точек. В процессе импорта облака точек преобразуются во внутренний формат, а соответствующий файл с расширением TPC сохраняется в указанное пользователем место на диске.

В разделе Последние файлы отображается список файлов, открывавшихся в предыдущие сеансы работы (первым указывается тот файл, который использовался последним). Для открытия файла из этого списка достаточно щёлкнуть на нём мышью. Также можно отдельно просмотреть файлы, открывавшиеся за последний месяц, неделю и т.д. Для этого выберите в выпадающем списке История соответствующий пункт.
Нажмите кнопку Главная > Облака точек>
Добавить облако и в выпадающем меню выберите пункт  Из файла LAS. В появившемся окне выберите нужный файл и нажмите кнопку Открыть .
Из файла LAS. В появившемся окне выберите нужный файл и нажмите кнопку Открыть .Перед выполнением импорта открывается диалоговое окно Преобразование LAS-файла для настройки параметров импорта.
- В разделе Информация о LAS-файле отображается информация о подгружаемом облаке точек.
- В разделе Основные настройки можно задать основные параметры импорта облака.
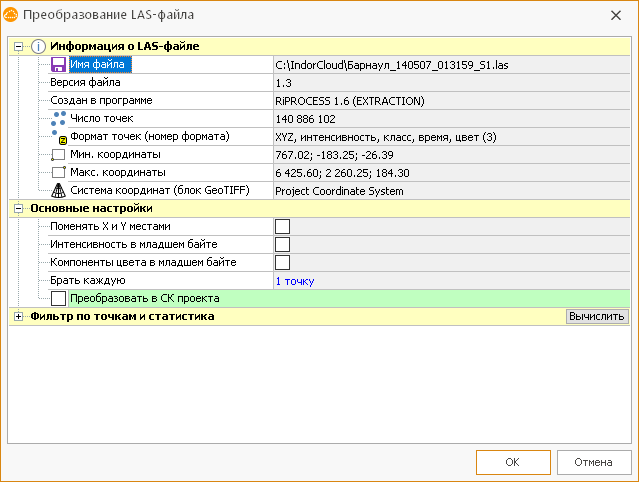
После нажатия кнопки OK выполняется конвертация облаков точек в файл формата TPC и открывается диалоговое окно сохранения файла, в котором необходимо ввести имя файла и нажать кнопку сохранения. В дальнейшем сконвертированный файл можно использовать для загрузки облаков точек без импорта из LAS-файла.
Текстовые файлы являются универсальным форматом, позволяющим обмениваться облаками точек между разными программами. Координаты точек из текстового файла можно загрузить в систему IndorCloud и использовать для работы.
В текстовом файле описания точек информация должна быть введена построчно. Для каждой точки должны быть заданы координаты (X, Y, Z) и цвет. Данные в строке могут отделяться пробелами, символами табуляции, запятыми и другими специальными символами-разделителями. Несколько первых строк могут быть комментарием к содержимому файла.
Чтобы загрузить облаков точек из текстового файла, нажмите кнопку Главная > Облака точек>
Добавить облако , а затем в выпадающем меню выберите пункт  Из текстового файла. В диалоговом окне импорта файла выделите файл с точками, после чего нажмите кнопку Открыть .
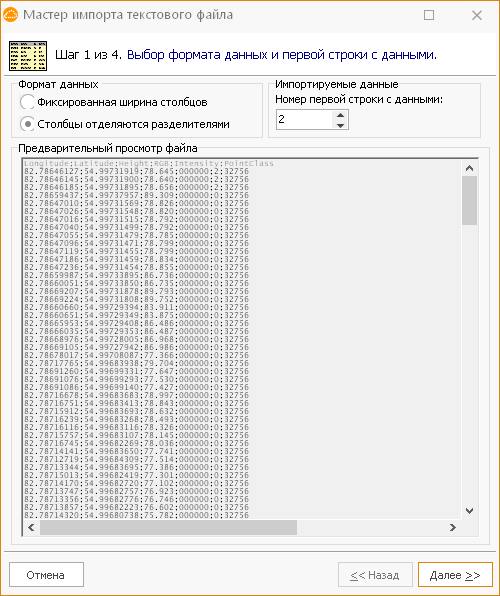
Из текстового файла. В диалоговом окне импорта файла выделите файл с точками, после чего нажмите кнопку Открыть .Следуя указаниям мастера импорта текстового файла, выберите формат представления данных в файле, а затем нажмите кнопку Готово . Переключение между шагами мастера осуществляется с помощью кнопок > . Чтобы отменить импорт данных, нажмите кнопку Отмена .
Если первые строки файла содержат комментарии, то укажите, с какой строки следует начинать импорт точек. Далее выберите один из двух форматов данных файла.
- Фиксированная ширина столбцов . В этом случае каждый столбец данных имеет заданную ширину.
- Столбцы отделяются разделителями . Значения полей данных отделяются знаками разделителями (пробелами, запятыми и т.д.)
В области Предварительный просмотр файла отображаются данные выбранного файла в заданном формате.
Параметры импорта, которые определяются на втором шаге мастера, зависят от выбранного формата данных.
Формат с фиксированной шириной столбцов . Если выбран формат с фиксированной шириной столбцов, то на втором шаге мастера необходимо определить количество и ширину полей, т.е. указать, как строку следует разбивать на столбцы.
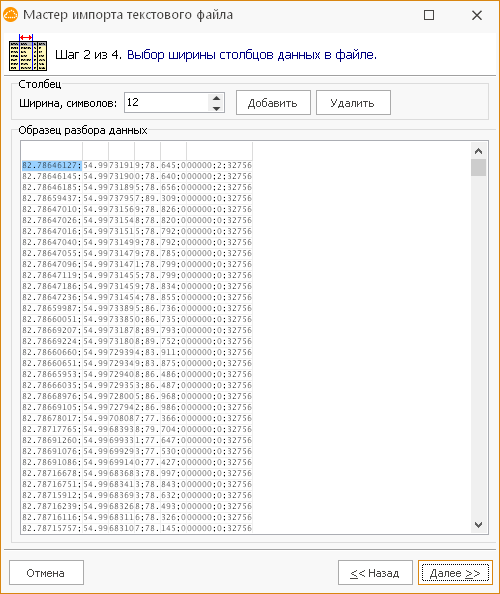
В первой строке таблицы Образец разбора данных вертикальные линии обозначают границы столбцов. Чтобы добавить или удалить разделитель, воспользуйтесь соответствующими кнопками. Установить ширину столбца можно двумя способами.
- Выделить любую ячейку столбца и указать ширину столбца в поле Ширина .
- Переместить линию-разделитель с помощью мыши. Для этого поместите указатель мыши на линию и перетащите её, удерживая нажатой кнопку мыши.
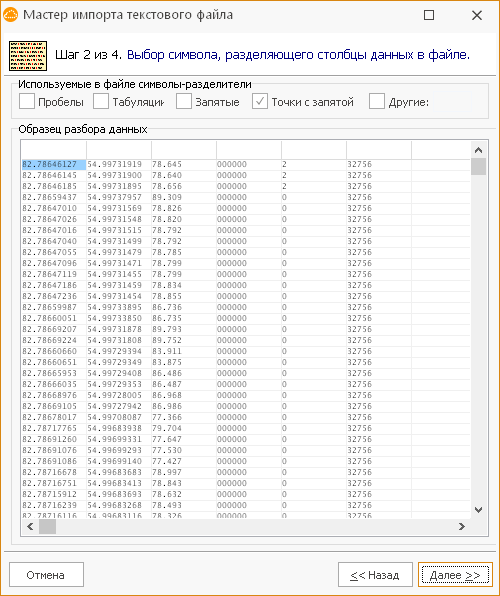
Формат с разделителями . Если выбран формат с разделителями, то на втором шаге мастера необходимо установить символы-разделители. В качестве символов-разделителей можно выбрать пробел, табуляцию, запятую, точку с запятой и любой другой символ, указанный пользователем в поле Другие .
Результат отображается в таблице Образец разбора данных .
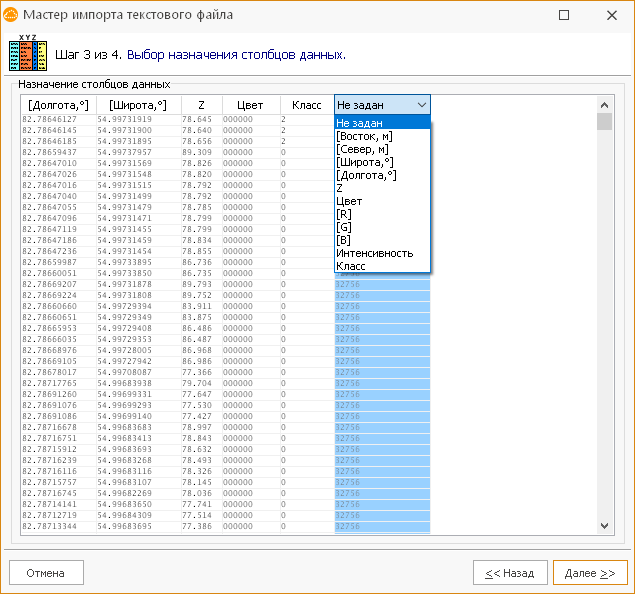
На третьем шаге мастера импорта требуется назначить типы столбцам данных в файле. Для этого щёлкните мышью на названии столбца и выберите тип столбца из раскрывающегося списка. Если тип столбца не задан, то данные из этого столбца не импортируются.
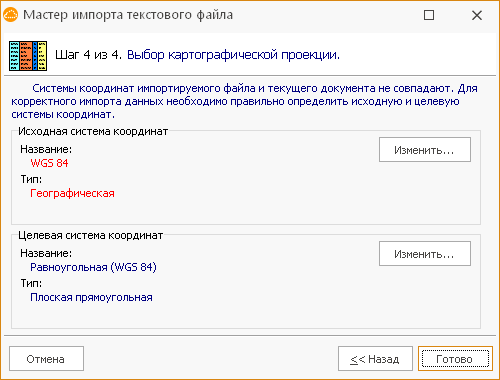
На четвёртом шаге необходимо задать картографическую проекцию, если она не соответствует текущей проекции, заданной в проекте.
После нажатия кнопки Готово выполняется конвертация облаков точек в файл формата TPC и открывается диалоговое окно сохранения файла, в котором необходимо ввести имя файла и нажать кнопку сохранить. В дальнейшем сконвертированный файл можно использовать для загрузки облаков точек без импорта из текстового файла. Импортированные облака точек отображаются в рабочей области.
Нажмите кнопку Главная > Облака точек> Добавить облако и в выпадающем меню выберите пункт Из файла TPC. В диалоговом окне импорта выберите нужный файл и нажмите кнопку Открыть . В результате в проект загружается новое облако точек, информацию о котором можно посмотреть в инспекторе объектов, предварительно выделив нужное облако в окне Проект .
Helpdesk Portal
Как импортировать облако точек из внешнего источника (например, LiDAR) в Metashape Печать
Изменено: Ср, 16 Фев, 2022 на 4:39 PM
Agisoft Metashape позволяет создавать и отображать плотное облако точек. На основе предполагаемых положений камеры программа вычисляет информацию о глубине для каждого снимка, которая будет объединена в одно плотное облако точек. Metashape позволяет создавать сверхплотные облака точек, плотность которых достигает или превышает плотность облака точек LiDAR.
Вы можете импортировать облака точек LiDAR или полученных на основе фотоснимков, экспортированных из внешних источников, в проект Metashape, чтобы объединить их с плотным облаком, созданным в Metashape, или заменить его. Описанный в статье алгоритм применим для версии Professional.
Этапы обработки представлены ниже:
- Добавление снимков
- Импорт облака точек (облако точек LiDAR)
- Размещение маркеров на облаке точек LiDAR и снимках
- Выравнивание снимков
- Построение модели (на основе облака точек LiDAR)
- Построение текстуры (на основе снимков)
Добавление снимков
1. Чтобы добавить снимки, выберите команду Добавить снимки. или Добавить папку. в меню Обработка.
2. В диалоговом окне Добавить снимки. перейдите к исходной папке и выберите изображения для обработки.

Импорт облака точек (облако точек LiDAR)
Metashape позволяет импортировать облако точек, которое на дальнейших этапах обработки интерпретируется как плотное облако точек. Если вы хотите загрузить плотное облако точек, полученное из какого-либо внешнего источника (построение на основе снимков в фотограмметрическом ПО, лазерное сканирование и т.д.). Плотное облако точек можно импортировать в одном из следующих форматов: Wavefront OBJ, Stanford PLY, ASPRS LAS, LAZ, ASTM E57, ASCII PTS.
Чтобы импортировать плотное облако точек:
1. Выберите команду Импорт > Импорт точек в меню Файл.
2. В диалоговом окне Импорт точек в папке перейдите к нужному файлу в одном из поддерживаемых форматов.
3. Нажмите кнопку Открыть.
4. Выставьте систему координат и сдвиг по трем осям в открывшемся диалоговом окне Импорт точек.

5. Нажмите кнопку ОК, чтобы начать импорт.
6. Появится диалоговое окно, отображающее текущий статус обработки. Для отмены обработки нажмите кнопку Отмена.

Размещение маркеров на облаке точек LiDAR и снимках
1. Добавьте маркеры на облако точек LiDAR, используя команду Добавить маркер в контекстном меню. Рекомендуется использовать как можно больше маркеров для более точного результата. Если у вас есть каталог наземных опорных точек, можно использовать их.

2. Добавьте маркеры на снимки.
3. Нажмите кнопку Обновить привязку на панели инструментов (необходимо, чтобы все маркеры были отмечены галочками на панели Привязка).

Выравнивание снимков
1. Выберите команду Выровнять снимки. в меню Обработка.
2. В диалоговом окне Выровнять снимки. выставьте необходимые настройки выравнивания.

3. Нажмите кнопку ОК. Появится диалоговое окно, отображающее текущий статус обработки. Для отмены обработки нажмите кнопку Отмена.
4. После завершении выравнивания в окне Модель будут отображаться рассчитанные положения камеры и разреженное облако точек.

Построение модели (на основе облака точек LiDAR)
1. Выберите команду Построить модель в меню Обработка. Установите плотное облако как исходные данные в настройках.

2. Нажмите кнопку ОК, чтобы начать построение полигональной модели.

Построение текстуры (на основе снимков)
1. Выберите команду Построить текстуру в меню Обработка. Установите Исходные данные — Снимки в диалоговом окне настроек.

2. Нажмите кнопку ОК, чтобы начать построение построение текстуры.

Была ли эта статья полезной? Да Нет
К сожалению, мы не смогли помочь вам в разрешении проблемы. Ваш отзыв позволит нам улучшить эту статью.